Модуль двигательной активности¶
Технические характеристики¶
- Размеры: TBA
- Напряжение питания: TBA
- Потребляемые ток, пиковый: TBA
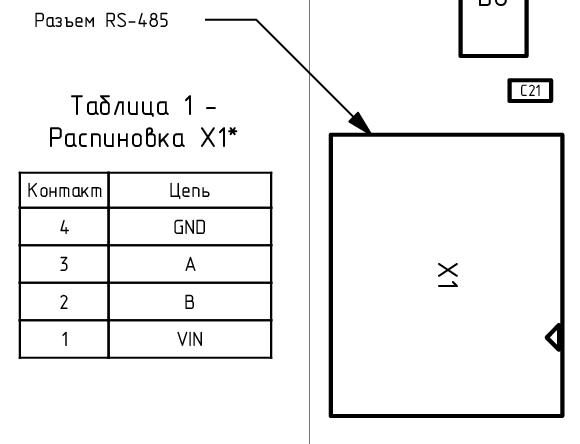
Подключение к головному устройству¶
Подключение к головному устройству осуществляется по протоколу RS-485 через разъем SH04, расположенному на плате. Распиновка приведена на рисунке ниже.
Выполняемые команды¶
Команда на получение углов Эйлера¶
Формат запроса¶
Длина запроса - 8 байт.
| Байт # | Поле | Тип | Значение | Описание |
|---|---|---|---|---|
| 0 | start_byte | uint8_t | 0xAA | Стартовый байт. Всегда равен 0xAA |
| 1 | id | uint8_t | 0x30 | Идентификатор получателя пакета. 0x30 - получатель - Датчик ДА |
| 2 | type | uint8_t | 0x01 | Тип пакета. 0x01 - пакет команды управления |
| 3 | action | uint8_t | 0x00 | Действие, которое необходимо выполнить. 0x00 - Чтение |
| 4 | param | uint8_t | 0x30 | Параметр для действия. 0x30 - Данные углов Эйлера. |
| 5 | data | uint8_t | 0x00 | Данные для действия. 0x00 - нет данных |
| 6 | payload | uint8_t | 0x00 | Дополнительные данные для действия. 0x00 - нет данных |
| 7 | checksum | uint8_t | 0x0B | Котрольная сумма пакета - младший байт суммы всех байтов пакета |
Формат ответа¶
Длина ответа - 20 байт.
| Байт # | Поле | Тип | Значение | Описание |
|---|---|---|---|---|
| 0 | start_byte | uint8_t | 0xAA | Стартовый байт. Всегда равен 0xAA |
| 1 | id | uint8_t | 0x01 | Идентификатор получателя пакета 0x01 - получатель - Головной модуль |
| 2 | type | uint8_t | 0x30 | 0x30 - Данные углов Эйлера |
| 3 | systime | uint32_t | 0xXX | Системное время модуля в миллисекундах. Порядок байт - little endian |
| 4 | 0xXX | |||
| 5 | 0xXX | |||
| 6 | 0xXX | |||
| 7 | heading | int16_t | 0xXX | Один из углов Эйлера - рысканье. 1 градус = 16 LSB Порядок байт - little endian |
| 8 | 0xXX | |||
| 9 | roll | int16_t | 0xXX | Один из углов Эйлера - крен. 1 градус = 16 LSB Порядок байт - little endian |
| 10 | 0xXX | |||
| 11 | pitch | int16_t | 0xXX | Один из углов Эйлера - тангаж. 1 градус = 16 LSB Порядок байт - little endian |
| 12 | 0xXX | |||
| 13 | lin_acc_x | int16_t | 0xXX | Линейное ускорение по оси X. 1 м/с^2 = 100 LSB Порядок байт - little endian |
| 14 | 0xXX | |||
| 15 | lin_acc_y | int16_t | 0xXX | Линейное ускорение по оси Y. 1 м/с^2 = 100 LSB Порядок байт - little endian |
| 16 | 0xXX | |||
| 17 | lin_acc_z | int16_t | 0xXX | Линейное ускорение по оси Z. 1 м/с^2 = 100 LSB Порядок байт - little endian |
| 18 | 0xXX | |||
| 19 | checksum | uint8_t | 0xXX | Контрольная сумма пакета - младший байт суммы всех байтов пакета |
Имплементация значений¶
- Поле systime содержит значение системного времени модуля с дискретностью миллисекунда
- Поле heading содержит значение одного из углов Эйлера - рысканье. Диапазон значений: от 0° до 360°. (поворот по часовой стрелке увеличивает значение)
- Поле roll содержит значение одного из углов Эйлера - крен. Диапазон значений: от -90° до 90°. (увеличивается с увеличинеим наклона)
- Поле pitch содержит значение одного из углов Эйлера - тангаж. Диапазон значений: от -180° до 180° (поворот по часовой стрелке увеличивает значение)
- Поля lin_acc_x, lin_acc_y, lin_acc_z содержат значения линейного ускорения по соответствующим осям
Примеры¶
Все команды приведены в HEX-формате без указания 0x
Запрос: AA 30 01 00 30 00 00 0B
Ответ: AA 01 30 FA 27 00 00 00 00 C3 FE 98 FF 01 00 FE FF 00 00 52
Интерпретация ответа:
- тип пакета - данные углов Эйлера
- systime = 00 00 27 FA = 10 234 мc,
- heading = 00 00 = 0°,
- roll = FE C3 = -19.8125°,
- pitch = FF 98 = -6.5°,
- acc_x = 00 01 = 0.01 м/с2,
- acc_y = FF FE = -0.02 м/с2,
- acc_z = 00 00 = 0 м/с2.
Команда на получение кватернионов¶
Формат запроса¶
Длина запроса - 8 байт.
| Байт # | Поле | Тип | Значение | Описание |
|---|---|---|---|---|
| 0 | start_byte | uint8_t | 0xAA | Стартовый байт. Всегда равен 0xAA |
| 1 | id | uint8_t | 0x30 | Идентификатор получателя пакета. 0x30 - получатель - Датчик ДА |
| 2 | type | uint8_t | 0x01 | Тип пакета. 0x01 - пакет команды управления |
| 3 | action | uint8_t | 0x00 | Действие, которое необходимо выполнить. 0x00 - Чтение |
| 4 | param | uint8_t | 0x31 | Параметр для действия. 0x40 - Данные кватернионов |
| 5 | data | uint8_t | 0x00 | Данные для действия. 0x00 - нет данных |
| 6 | payload | uint8_t | 0x00 | Дополнительные данные для действия. 0x00 - нет данных |
| 7 | checksum | uint8_t | 0x0C | Контрольная сумма пакета - младший байт суммы всех байтов пакета |
Формат ответа¶
Длина ответа - 16 байт.
| Байт # | Поле | Тип | Значение | Описание |
|---|---|---|---|---|
| 0 | start_byte | uint8_t | 0xAA | Стартовый байт. Всегда равен 0xAA |
| 1 | id | uint8_t | 0x01 | Идентификатор получателя пакета 0x01 - получатель - Головной модуль |
| 2 | type | uint8_t | 0x31 | 0x31 - Данные кватернионов |
| 3 | systime | uint32_t | 0xXX | Системное время модуля в миллисекундах. Порядок байт - little endian |
| 4 | 0xXX | |||
| 5 | 0xXX | |||
| 6 | 0xXX | |||
| 7 | w | int16_t | 0xXX | Значение кватерниона. 1 кватернион = 2^14 LSB Порядок байт - little endian |
| 8 | 0xXX | |||
| 9 | x | int16_t | 0xXX | Значение кватерниона. 1 кватернион = 2^14 LSB Порядок байт - little endian |
| 10 | 0xXX | |||
| 11 | y | int16_t | 0xXX | Значение кватерниона. 1 кватернион = 2^14 LSB Порядок байт - little endian |
| 12 | 0xXX | |||
| 13 | z | int16_t | 0xXX | Значение кватерниона. 1 кватернион = 2^14 LSB Порядок байт - little endian |
| 14 | 0xXX | |||
| 15 | checksum | uint8_t | 0xXX | Контрольная сумма пакета - младший байт суммы всех байтов пакета |
Имплементация значений¶
- Поле systime содержит значение системного времени модуля с дискретностью миллисекунда
- Поля w, x, y, z содержат значения кватернионов
Примеры¶
Все команды приведены в HEX-формате без указания 0x
Запрос: AA 30 01 00 31 00 00 0C
Ответ: AA 01 31 A1 0E 00 00 F5 3E 8A 03 F4 0A FF FF 47
Интерпретация ответа:
- тип пакета - данные кватерниона
- systime = 00 00 0E A1 = 3745 мс,
- w = 3E F5 = 0.98370361328125,
- x = 03 8A = 0.0552978515625,
- y = 0A F4 = 0.171142578125,
- z = FF FF = -0.00006103515625.
Команда на получение сырых данных¶
Формат запроса¶
Длина запроса - 8 байт.
| Байт # | Поле | Тип | Значение | Описание |
|---|---|---|---|---|
| 0 | start_byte | uint8_t | 0xAA | Стартовый байт. Всегда равен 0xAA |
| 1 | id | uint8_t | 0x30 | Идентификатор получателя пакета. 0x30 - получатель - Датчик ДА |
| 2 | type | uint8_t | 0x01 | Тип пакета. 0x01 - пакет команды управления |
| 3 | action | uint8_t | 0x00 | Действие, которое необходимо выполнить. 0x00 - Чтение |
| 4 | param | uint8_t | 0x32 | Параметр для действия. 0x32 - Сырые данные |
| 5 | data | uint8_t | 0x00 | Данные для действия. 0x00 - нет данных |
| 6 | payload | uint8_t | 0x00 | Дополнительные данные для действия. 0x00 - нет данных |
| 7 | checksum | uint8_t | 0x0D | Контрольная сумма пакета - младший байт суммы всех байтов пакета |
Формат ответа¶
Длина ответа - 26 байт.
| Байт # | Поле | Тип | Значение | Описание |
|---|---|---|---|---|
| 0 | start_byte | uint8_t | 0xAA | Стартовый байт. Всегда равен 0xAA |
| 1 | id | uint8_t | 0x01 | Идентификатор получателя пакета 0x01 - получатель - Головной модуль |
| 2 | type | uint8_t | 0x32 | 0x32 - Сырые данные |
| 3 | systime | uint32_t | 0xXX | Системное время модуля в миллисекундах. Порядок байт - little endian |
| 4 | 0xXX | |||
| 5 | 0xXX | |||
| 6 | 0xXX | |||
| 7 | acc_x | int16_t | 0xXX | Данные акселерометра по оси X. 1 м/с^2 = 100 LSB Порядок байт - little endian |
| 8 | 0xXX | |||
| 9 | acc_y | int16_t | 0xXX | Данные акселерометра по оси Y. 1 м/с^2 = 100 LSB Порядок байт - little endian |
| 10 | 0xXX | |||
| 11 | acc_z | int16_t | 0xXX | Данные акселерометра по оси Z. 1 м/с^2 = 100 LSB Порядок байт - little endian |
| 12 | 0xXX | |||
| 13 | mag_x | int16_t | 0xXX | Данные магнитометра по оси X. 1 мкТ = 16 LSB Порядок байт - little endian |
| 14 | 0xXX | |||
| 15 | mag_y | int16_t | 0xXX | Данные магнитометра по оси Y. 1 мкТ = 16 LSB Порядок байт - little endian |
| 16 | 0xXX | |||
| 17 | mag_z | int16_t | 0xXX | Данные магнитометра по оси Z. 1 мкТ = 16 LSB Порядок байт - little endian |
| 18 | 0xXX | |||
| 19 | gyro_x | int16_t | 0xXX | Данные гироскопа по оси X. 1 Dps = 16 LSB Порядок байт - little endian |
| 20 | 0xXX | |||
| 21 | gyro_y | int16_t | 0xXX | Данные гироскопа по оси Y. 1 Dps = 16 LSB Порядок байт - little endian |
| 22 | 0xXX | |||
| 23 | gyro_z | int16_t | 0xXX | Данные гироскопа по оси Z. 1 Dps = 16 LSB Порядок байт - little endian |
| 24 | 0xXX | |||
| 25 | checksum | uint8_t | 0xXX | Контрольная сумма пакета - младший байт суммы всех байтов пакета |
Имплементация значений¶
- Поле systime содержит значение системного времени модуля с дискретностью миллисекунда
- Поля acc_x, acc_y, acc_z содержат данные акселерометра по соответствующим осям
- Поля mag_x, mag_y, mag_z содержат данные магнитометра по соответствующим осям
- Поля gyro_x, gyro_y, gyro_z содержат данные гироскопа по соответствующим осям
Примеры¶
Все команды приведены в HEX-формате без указания 0x
Запрос: AA 30 01 00 32 00 00 0D
Ответ: AA 01 32 3F 0C 00 00 B7 FE 69 00 99 03 D0 00 C4 FF 77 FE FF FF 01 00 01 00 EA
Интерпретация ответа:
- тип пакета - сырые данные ДА
- systime = 00 00 0C 3F = 3135 мс,
- acc_x = FE B7 = -3.29 м/с^2,
- acc_y = 00 69 = 1.05 м/с^2,
- acc_z = 03 99 = 9.21 м/с^2,
- mag_x = 00 D0 = 13 1 мкТ,
- mag_y = FF C4 = -3.75 1 мкТ,
- mag_z = FE 77 = -24.5625 1 мкТ,
- gyro_x = FF FF = -0.0625 Dps,
- gyro_y = 00 01 = 0.0625 Dps,
- gyro_z = 00 01 = 0.0625 Dps.